

 œύΙΊΉ®ΧβΘΚ
œύΙΊΉ®ΧβΘΚ
ΓΓΓΓGPS(Global Positioning SystemΘ§»Ϊ«ρΕ®ΈΜœΒΆ≥) «ΟάΙζ¥”20 άΦΆ70Ρξ¥ζΩΣ Φ―–÷ΤΘ§άζ ±20ΡξΘ§ΚΡΉ 200“ΎΟά‘ΣΘ§ΨΏ”–‘ΎΚΘΓΔ¬ΫΓΔΩ’Ϋχ––»ΪΖΫΈΜ Β ±»ΐΈ§ΒΦΚΫ”κΕ®ΈΜΡήΝΠΒΡ–¬“Μ¥ζΈά–«ΒΦΚΫ”κΕ®ΈΜœΒΆ≥[1]ΓΘΤδΒΊΟφΦύΩΊœΒΆ≥ΒΡ‘≠άμΩρΆΦ»γΆΦ1Υυ ΨΓΘ
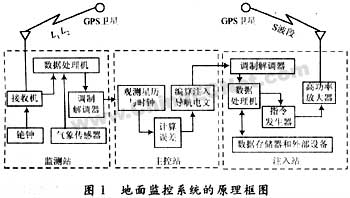
ΓΓΓΓ1Θ°1 GPSΕ®ΈΜ‘≠άμ
ΓΓΓΓGPSΕ®ΈΜΒΡΜυ±Ψ‘≠άμ «ΗυΨίΗΏΥΌ‘ΥΕ·ΒΡΈά–«Υ≤ΦδΈΜ÷ΟΉςΈΣ“―÷ΣΒΡΤπΥψ ΐΨίΘ§≤…”ΟΩ’ΦδΨύάκΚσΖΫΫΜΜαΒΡΖΫΖ®Θ§»ΖΕ®¥ΐ≤βΒψΒΡΈΜ÷ΟΓΘ»γΆΦ2Υυ ΨΘ§ΦΌ…ηt ±ΩΧ‘ΎΒΊΟφ¥ΐ≤βΒψ…œΑ≤÷ΟGPSΫ” ’ΜζΘ§Ω…“‘≤βΕ®GPS–≈Κ≈ΒΫ¥οΫ” ’ΜζΒΡ ±ΦδtΘ§‘ΌΦ”…œΫ” ’ΜζΥυΫ” ’ΒΫΒΡΈά–«–«άζΒ»ΤδΥϊ ΐΨίΩ…“‘»ΖΕ®“‘œ¬4ΗωΖΫ≥Χ ΫΘΚ

ΓΓΓΓ…œ ω4ΗωΖΫ≥Χ Ϋ÷–¥ΐ≤βΒψΉχ±ξxΘ§yΘ§zΚΆVt0ΈΣΈ¥÷Σ≤Έ ΐΘ§Τδ÷–di=cti(i=1Θ§2Θ§3Θ§4)ΓΘdi(i=1Θ§2Θ§3Θ§4)Ζ÷±πΈΣΈά–«1Θ§Έά–«2Θ§Έά–«3Θ§Έά–«4ΒΫΫ” ’Μζ÷°ΦδΒΡΨύάκΓΘti(i=1Θ§2Θ§3Θ§4)Ζ÷±πΈΣΈά–«1Θ§Έά–«2Θ§Έά–«3Θ§Έά–«4ΒΡ–≈Κ≈ΒΫ¥οΫ” ’ΜζΥυΨ≠άζΒΡ ±ΦδΓΘcΈΣGPS–≈Κ≈ΒΡ¥Ϊ≤ΞΥΌΕ»(Φ¥ΙβΥΌ)ΓΘ
ΓΓΓΓ4ΗωΖΫ≥Χ Ϋ÷–ΗςΗω≤Έ ΐ“β“ε»γœ¬ΘΚ
ΓΓΓΓxΘ§yΘ§zΈΣ¥ΐ≤βΒψΉχ±ξΒΡΩ’Φδ÷±Ϋ«Ήχ±ξΓΘ
ΓΓΓΓxiΘ§yiΘ§zi(i=1Θ§2Θ§3Θ§4)Ζ÷±πΈΣΈά–«1ΓΔΈά–«2ΓΔΈά–«3ΓΔΈά–«4‘Ύt ±ΩΧΒΡΩ’Φδ÷±Ϋ«Ήχ±ξΘ§Ω…”…Έά–«ΒΦΚΫΒγΈΡ«σΒΟΓΘVti(i=1Θ§2Θ§3Θ§4)Ζ÷±πΈΣΈά–«1Θ§Έά–«2Θ§Έά–«3Θ§Έά–«4ΒΡΈά–«÷”ΒΡ÷”≤νΘ§”…Έά–«–«άζΧαΙ©ΓΘVt0ΈΣΫ” ’ΜζΒΡ÷”≤νΓΘ
ΓΓΓΓ”…“‘…œ4ΗωΖΫ≥ΧΦ¥Ω…ΫβΥψ≥ω¥ΐ≤βΒψΒΡΉχ±ξxΘ§yΘ§zΚΆΫ” ’ΜζΒΡ÷”≤νVt0ΓΘ
ΓΓΓΓΡΩ«ΑGPSœΒΆ≥ΧαΙ©ΒΡΕ®ΈΜΨΪΕ»ΒΆ”Ύ10mΘ§ΕχΈΣΒΟΒΫΗϋΗΏΒΡΕ®ΈΜΨΪΕ»Θ§Ά®≥Θ≤…”Ο≤νΖ÷GPSΦΦ θΘΚΫΪ“ΜΧ®GPSΫ” ’ΜζΑ≤÷Ο‘ΎΜυΉΦ’Ψ…œΫχ––Ιέ≤βΓΘΗυΨίΜυΉΦ’Ψ“―÷ΣΨΪΟήΉχ±ξΘ§ΦΤΥψ≥ωΜυΉΦ’ΨΒΫΈά–«ΒΡΨύάκΗΡ’ΐ ΐΘ§≤Δ”…ΜυΉΦ’Ψ Β ±ΫΪ’β“Μ ΐΨίΖΔΥΆ≥ω»ΞΓΘ”ΟΜßΫ” ’Μζ‘ΎΫχ––GPSΙέ≤βΒΡΆ§ ±Θ§“≤Ϋ” ’ΒΫΜυΉΦ’ΨΖΔ≥ωΒΡΗΡ’ΐ ΐΘ§≤ΔΕ‘ΤδΕ®ΈΜΫαΙϊΫχ––ΗΡ’ΐΘ§¥”ΕχΧαΗΏΕ®ΈΜΨΪΕ»ΓΘ
ΓΓΓΓ1Θ°2 GPS÷ς“Σ”ΟΆΨ
ΓΓΓΓGPS–‘Ρή”≈“λΘ§”Π”ΟΖΕΈßΦΪΙψΓΘΩ…“‘ΥΒΘ§Ζ≤ «–η“ΣΒΦΚΫΚΆΕ®ΈΜΒΡ≤ΩΟ≈Θ§ΕΦΩ…“‘≤…”ΟGPSΓΘGPSΒΡΫ®≥…ΚΆ”Π”ΟΘ§ «ΒΦΚΫΦΦ θΒΡ“Μ≥ΓΗοΟϋΘ§”Αœλ…ν‘ΕΓΘΤδ÷ς“Σ”ΟΆΨ”–ΘΚ
ΓΓΓΓ(1)ΒΦΚΫΕ®ΈΜ”Π”Ο
ΓΓΓΓGPS «Ω’÷–ΓΔΚΘ―σΚΆ¬ΫΒΊΒΦΚΫΕ®ΈΜΉνœ»ΫχΓΔΉνάμœκΒΡΦΦ θΓΘΥϊΩ…“‘ΈΣΖ…ΜζΓΔΫΔ¥§ΓΔ≥ΒΝΨΓΔΧΙΩΥΓΔ≈Ύ±χΓΔ¬ΫΨϋ≤ΩΕ”ΚΆΩ’ΫΒ±χΧαΙ©»ΪΧλΚρΝ§–χΒΦΚΫΕ®ΈΜΓΘΥϊ «ΚΫΧλΖ…ΜζΚΆ‘Ί»ΥΖ…¥§ΉνάμœκΒΡ÷ΤΒΦΓΔΒΦΚΫœΒΆ≥ΓΘΈΣΤδΤπΖ…ΓΔ‘ΎΙλ‘Υ––ΚΆ‘Ό»κΙΐ≥ΧΝ§–χΖΰΈώΓΘ
ΓΓΓΓ(2)ΨΪΟήΕ®ΈΜ”Π”Ο
ΓΓΓΓ”Π”ΟGPS‘Ί≤®œύΈΜ≤βΝΩΦΦ θΘ§Ω…“‘ΨΪ»ΖΒΊ≤βΕ®ΝΫΒψΦδΒΡœύΕ‘ΈΜ÷ΟΘ§ΈΣ¥σΒΊ≤βΝΩΓΔΚΘ―σ≤βΝΩΓΔΚΫΩ’…ψ”Α≤βΝΩΚΆΒΊ«ρΕ·ΝΠ―ß≤βΝΩΧαΙ©ΝΥΗΏΨΪΕ»ΓΔœ÷¥ζΜ·ΒΡ≤βΝΩ ÷ΕΈΓΘGPS“―ΙψΖΚ”Π”Ο”ΎΫ®ΝΔΉΦ»ΖΒΡ¥σΒΊΜυΉΦΓΔ¥σΒΊΩΊ÷ΤΆχΚΆΒΊΩ«‘ΥΕ·Φύ≤βΆχΒ»ΓΘ
ΓΓΓΓ(3)ΨΪΟή Ύ ±ΓΔ¥σΤχ―–ΨΩ
ΓΓΓΓGPS”ΟΜßΫ” ’ΜζΆ®ΙΐΕ‘GPSΈά–«ΒΡΙέ≤βΘ§Ω…ΜώΒΟΉΦ»ΖGPS ±ΓΘGPS ±”κUTC ± «Ά§≤ΫΒΡΘ§“ρ¥ΥGPS“ύ «Β±ΫώΨΪΕ»ΉνΗΏΒΡ»Ϊ«ρ Ύ ±œΒΆ≥ΓΘ“ΜΑψΫ” ’Μζ≤β ±ΨΪΕ»ΈΣ100 nsΘΜΉ®”ΟΕ® ±Ϋ” ’ΜζΩ…ΜώΒΟΗϋΗΏΒΡΨΪΕ»Θ§”Ο”Ύ‘ΕΨύάκ ±ΦδΆ§≤ΫΩ…¥οnsΦΕΓΘ”…”ΎUTC ±”–ΧχΟκΘ§Ι GPS ±”κUTC ±”–“―÷ΣΒΡ’ϊ ΐΟκ≤νΓΘάϊ”ΟGPS≤βΕ®ΒΡΒγάκ≤ψ―”≥ΌΚΆΕύΤ’ά’ΤΒ“Τ―”≥ΌΘ§Ω…”Οά¥―–ΨΩΒγάκ≤ψΒΡΒγΉ”ΜΐΖ÷≈®Ε»ΓΔ’έ…δœΒ ΐΓΔΒγΉ”≈®Ε»ΥφΗΏΕ»ΒΡΖ÷≤ΦΘ§“‘ΦΑ…œ ωΒγάκ≤ψ≤ΈΝΩ‘Ύ ±ΦδΚΆΩ’Φδ…œΒΡœύΙΊ–‘Β»ΓΘ
ΓΓΓΓ(4)ΈΣΈδΤςΨΪ»Ζ÷ΤΒΦ
ΓΓΓΓ”Π”ΟGPSΘ·INSΉιΚœ÷ΤΒΦœΒΆ≥ ±Θ§GPS≤ΜΕœ–ό’ΐΒΦΒ·Ζ…––÷–ΙΏ–‘ΒΦΚΫΈσ≤νΘ§ΧαΗΏ÷ΤΒΦΨΪΕ»Θ§‘ω«ΩΈδΤςΒΡ"ΨΪ»Ζ¥ρΜς"ΡήΝΠΓΘ‘ΎΚΘΆε’Ϋ’υ÷–Θ§GPSΈΣΧαΗΏΈδΤςΒΡΟϋ÷–ΨΪΕ»Θ§ΖΔΜ”ΝΥΨό¥σΉς”ΟΘ§Ι ±Μ≥ΤΈΣ"–ß“φ±Ε‘ωΤς"ΓΘ
ΓΓΓΓ(5)ΚΫΧλ”κΈδΤς ‘―ι÷–ΒΡ”Π”Ο
ΓΓΓΓGPS‘ΎΗςάύΚΫΧλΤςΕ®ΙλΚΆΒΦΒ·ΓΔ≥ΘΙφΈδΤς ‘―ι÷–”–Ή≈ΙψΖΚΒΡ”Π”ΟΓΘGPSΩ…ΈΣΗςάύΈά–«≤βΕ®ΨΪΟήΙλΒάΓΘ”Ο≤νΖ÷GPSΆξ≥…Ζ…¥§ΒΡΫΜΜαΚΆΕ‘Ϋ”ΓΘ‘ΎΈδΤς ‘―ι÷–Θ§”Π”ΟGPSΩ…ΨΪ»Ζ≤βΕ®Β·ΒάΓΘΥϊΨΏ”–≤Μ ήΧλΤχΧθΦΰΓΔΖΔ…δ≥Γ«χΓΔ…δœρΓΔ…δ≥ΧΚΆΖΔ…δ¥ΑΩΎΒΡœό÷ΤΘΜΩ… Βœ÷Ν§–χΓΔ»Ϊ≥ΧΗζΉΌ≤βΝΩΘ§Ω…ΗζΉΌΒΆΖ…ΚΆΕύΗωΡΩ±ξΘ§«“ΨΪΕ»ΗΏΓΔΖ―”ΟΒΆΓΘ
ΓΓΓΓGPSΜΙΩ…”Ο”ΎΖ…––ΤςΉΥΧ§≤βΝΩΓΘΉΥΧ§≤βΝΩ≤…”ΟGPS‘Ί≤®œύΦλ≤βΝΩΦΦ θΓΘ‘ΎΈά–«ΜρΤδΥϊΚΫΧλΤςΒΡ Β±ΈΜ÷Ο…œΑ≤ΉΑΕύΗ±ΧλœΏΘ§”ΟGPS≤βΕ®ΗςΧλœΏΒΡΨΪ»ΖΈΜ÷ΟΘ§¥”Εχ»ΖΕ®ΚΫΧλΤςΒΡΉΥΧ§ΓΘ
ΓΓΓΓ2 ΡΩ±ξΤΫΧ®Ϋι…ή
ΓΓΓΓ‘Ύ±ΨΈΡ÷– Ι”ΟΒΡΡΩ±ξΤΫΧ®S3C2410 «SAMSUNGΙΪΥΨ Ι”ΟARM920T¥ΠάμΤςΡΎΚΥΩΣΖΔΒΡ“ΜΩν«Ε»κ Ϋ¥ΠάμΤςΓΘS3C2410 «SAMSUNGΙΪΥΨΉ®Ο≈ΈΣPDAΘ§Internet…η±ΗΚΆ ÷≥÷…η±ΗΒ»Ή®Ο≈ΩΣΖΔΒΡΈΔ¥ΠάμΤςΓΘΗΟ–ΨΤ§ΜΙΑϋΚ§”–16 kB“ΜΧεΜ·ΒΡCacheΘ·MMUΘ§’β“ΜΧΊ–‘ ΙΩΣΖΔ»Υ‘±ΡήΙΜΫΪLinuxΚΆVX-work“Τ÷≤ΒΫΜυ”ΎΗΟ¥ΠάμΤςΒΡΡΩ±ξœΒΆ≥÷–ΓΘ
ΓΓΓΓΗΟΡΩ±ξΑεΒΡœΒΆ≥Ή ‘¥»γœ¬ΘΚ
ΓΓΓΓ(1)CPUΘΚS3C2410ΈΔ¥ΠάμΤςΘ§ΙΛΉςΤΒ¬ ΈΣ200 MHzΘΜ
ΓΓΓΓ(2)FLASHΘΚ16 MBΘΜ
ΓΓΓΓ(3)SDRAMΘΚ64 MB SDRAMΘΜ
ΓΓΓΓ(4)UARTΘΚRS 232¥°––Ϋ”ΩΎΘΜ
ΓΓΓΓ(5)ΤδΥϊΘΚ14’κARM JTAGΫ”ΩΎΒ»ΘΜ
ΓΓΓΓ(6)“ΚΨßœ‘ ΨΤΝΓΘ
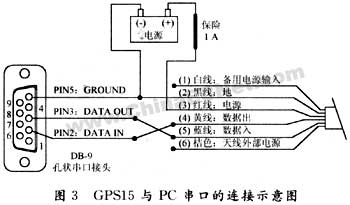
ΓΓΓΓ‘ΎΡΩ±ξΤΫΧ®S3C2410…œΥυ―Γ≈δΒΡGPSΡΘΩι «GPS15LΘ·HΓΘΫ”ΩΎΧΊ–‘»γœ¬ΘΚRS 232 δ≥ωΘ§Ω… δ»κRS 232Μρ’ΏΨΏ”–RS 232ΦΪ–‘ΒΡTTLΒγΤΫΓΘΩ…―ΓΒΡ≤®ΧΊ¬ ΈΣΘΚ300Θ§600Θ§1 200Θ§2 400Θ§4 800Θ§9 600Θ§19 200ΓΘGPS15”κPC¥°ΩΎΒΡΝ§Ϋ”Φϊ Ψ“βΆΦ(ΆΦ3)Υυ ΨΓΘ
ΓΓΓΓ¥°ΩΎ δ≥ω–≠“ιΘΚ δ≥ωNEMA0183Ηώ ΫΒΡASCII¬κ”οΨδΘ§ δ≥ωΘΚGPALMΘ§GPGGAΘ§GPGLLΘ§GPGSAΘ§GPGSVΘ§GPRMCΘ§GPVTG(NMEA±ξΉΦ”οΨδ)ΘΜPGRMBΘ§PGRMEΘ§PGRMFΘ§PGRMMΘ§PGRMTΘ§PGRMV(GARMINΕ®“εΒΡ”οΨδ)ΓΘΜΙΩ…ΫΪ¥°ΩΎ…η÷ΟΈΣ δ≥ωΑϋά®GPS‘Ί≤®œύΈΜ ΐΨίΒΡΕΰΫχ÷Τ ΐΨίΓΘ δ»κΘΚ≥θ ΦΈΜ÷ΟΓΔ ±ΦδΓΔΟκ¬ω≥εΉ¥Χ§ΓΔ≤νΖ÷ΡΘ ΫΓΔNMEA δ≥ωΦδΗτΒ»…η÷Ο–≈œΔΓΘ‘Ύ»± ΓΒΡΉ¥Χ§œ¬Θ§GPSΡΘΩι δ≥ω ΐΨίΒΡ≤®ΧΊ¬ ΈΣ4800Θ§ δ≥ω–≈œΔΑϋά®ΘΚGPRMCΘ§GPGGAΘ§GPGSAΘ§GPGSVΘ§PGRMEΒ»Θ§ΟΩΟκ÷”Ε® ± δ≥ωΘ§»γ3Υυ ΨΓΘ
ΓΓΓΓ3 ΫΜ≤φ±ύ“κΜΖΨ≥ΒΡΫ®ΝΔΦΑ≥Χ–ρΒΡ Βœ÷
ΓΓΓΓΜυ”ΎLinux≤ΌΉςœΒΆ≥ΒΡ”Π”ΟΩΣΖΔΜΖΨ≥“ΜΑψ «”…ΡΩ±ξœΒΆ≥”≤ΦΰΘ®ΩΣΖΔΑεΘ©ΚΆΥό÷ςPCΜζΥυΙΙ≥…[2]ΓΘΡΩ±ξ”≤ΦΰΩΣΖΔΑε”Ο”Ύ‘Υ––≤ΌΉςœΒΆ≥ΚΆœΒΆ≥”Π”Ο»μΦΰΘ§ΕχΡΩ±ξΑεΥυ”ΟΒΫΒΡ≤ΌΉςœΒΆ≥ΒΡΡΎΚΥ±ύ“κΓΔ”Π”Ο≥Χ–ρΒΡΩΣΖΔΚΆΒς ‘‘ρ–η“ΣΆ®ΙΐΥό÷ςPCΜζά¥Άξ≥…Θ®Υυ“‘≥ΤΈΣΫΜ≤φ±ύ“κΘ©ΓΘΥΪΖΫ÷°Φδ“ΜΑψΆ®Ιΐ¥°ΩΎΘ§≤ΔΩΎΜρ“‘ΧΪΆχΫ”ΩΎΫ®ΝΔΝ§Ϋ”ΙΊœΒΓΘ
ΓΓΓΓ3.1 …’–¥LinuxΡΎΚΥΒ»
ΓΓΓΓΆ®Ιΐ¥°ΩΎΘ§Υό÷ςPCΜζœρΡΩ±ξΩΣΖΔΑε…’–¥VIVIΘ§Ψ≠Ιΐ≤ΟΦθΒΡLinuxΡΎΚΥ“‘ΦΑΗυΈΡΦΰœΒΆ≥Β»Θ§»ΜΚσΑ≤ΉΑ÷ς±ύ“κΤςArmv41-unknown-linux-gccΓΘ
ΓΓΓΓ3.2 NFSΖΰΈώΤςΒΡ≈δ÷Ο
ΓΓΓΓ‘Ύ±ΨΈΡ÷–Υό÷ςPCΜζ…œΉΑΒΡ «READHAT 9.2Θ§ΥϊΡ§»œΒΡ «¥ρΩΣΝΥΖάΜπ«ΫΘ§ΡΩ±ξΩΣΖΔΤΫΧ®ΈόΖ®”ΟNFS mountΓΘ“ρ¥Υ”Πœ»ΙΊ±’ΖάΜπ«ΫΘ§»ΜΚσΒψΜς÷ς≤ΥΒΞ‘Υ––œΒΆ≥…η÷ΟΓζΖΰΈώΤς…η÷ΟΓζNFSΖΰΈώΤςΘ®”ΔΈΡΈΣΘΚSETUPΓζSYSTEMΓΓSERVICEΓζNFSΘ©Θ§ΒψΜς‘ωΦ”Θ§‘ΎΡΩ¬ΦΘ®DirectoryΘ©÷–Χν»κ–η“ΣΙ≤œμΒΡ¬ΖΨΕΘ§÷ςΜζΘ®HostsΘ©ΘΜ÷–Χν»κ‘ –μΫχ––Ν§Ϋ”ΒΡ÷ςΜζIPΒΊ÷Ζ[3]Θ§≤Δ―Γ‘ώ‘ –μΩΆΜßΕ‘Ι≤œμΡΩ¬ΦΒΡ≤ΌΉςΈΣ÷ΜΕΝΘ®Read-onlyΘ©ΜρΕΝ–¥Θ®Read/WriteΘ©ΓΘ
ΓΓΓΓΓΓΓΓ3.3 ≈δ÷ΟMINICOM
‘ΎLinux≤ΌΉςœΒΆ≥XwindowΫγΟφœ¬Ϋ®ΝΔ÷’ΕΥΘ®‘ΎΉάΟφ…œΒψΜς”“ΦϋΓζ–¬Ϋ®÷’ΕΥΘ©Θ§‘Ύ÷’ΕΥΒΡΟϋΝν––Χα ΨΖϊΚσ δ»κMINICOMΘ§ΜΊ≥ΒΘ§≥ωœ÷WINCOMΒΡΤτΕ·Μ≠ΟφΘ§»ΜΚσΑ¥’’Χα Ψ…η÷ΟΦ¥Ω…ΓΘ
ΓΓΓΓ3.4 ±ύ≥ΧΚΆΒς ‘
ΓΓΓΓ‘Ύ¥ΥΫΜ≤φ±ύ“κΜΖΨ≥œ¬Θ§ΗυΨί«ΑΟφΧαΒΫΒΡGPSΕ®ΈΜ‘≠άμΘ§Ψ≠Ιΐ±ύ≥ΧΚΆΒς ‘Θ§‘ΎΡΩ±ξΤΫΧ®ΒΡ“ΚΨßœ‘ ΨΤΝ…œΩ…œ‘ Ψ±ΨΒΊΒΡΒΊάμΈΜ÷Ο–≈œΔΓΘ
ΓΓΓΓΉΔ“βΘ§GPSΒΡΧλœΏ“ΣΖ≈‘ΎΡήΝΦΚΟΫ” ή “Άβ–≈Κ≈ΒΡΒΊΖΫΘ§±»»γΥΒ¥ΑΧ®Β»ΓΘΖώ‘ρΩ…ΡήΫ” ’≤ΜΒΫ–≈Κ≈ΓΘ
ΓΓΓΓ4 Ϋα”ο
ΓΓΓΓ±ΨΈΡΫι…ήΝΥGPSΕ®ΈΜΒΡΙΛΉς‘≠άμΦΑΤδ‘ΎS3C2410…œΒΡ Βœ÷ΖΫΖ®Θ§‘Ύ≥Β‘ΊGPSœΒΆ≥ΦΑΤδΥϊΒΦΚΫœΒΆ≥÷–”–ΚήΕύΒΡ”Π”Ο«ΑΨΑΓΘ





