

所有DAC都会表现出一定程度的谐波失真,谐波失真是用来衡量当DAC输入端采用一个理想的均匀采样正弦波的数值序列驱动时,其输出端能在多大程度上再现这个理想的正弦波。由于DAC的瞬态和静态特性并不理想,因此输出频谱将会包含谐波成分。DAC的瞬态输出特性包括压摆率限制、非对称上升和下降时间、有限建立时间。静态特性与传递函数偏离直线的程度有关。本文将重点讨论静态特性,并阐述一种由输出频谱中观察到的谐波成分导出DAC传递函数的方法。分析中假设,传递函数而非瞬态输出特性是所观察到的谐波失真的主要来源。此假设在低频时成立。
DAC传递函数
图1显示一个理想的DAC传递函数,它是一条斜线,y=mx+b。数字输入位于x轴,模拟输出位于y轴。

图1. 理想的DAC传递函数
x轴上的目标范围是从左边的最小码(A)到右边的最大码(B)。y轴上的目标范围是从底部的最小输出值(C)到接近顶部的最大输出值(D)。定义理想传递函数的斜率(m)和y轴截距(b)的方程式用边界值A、B、C、D表示。信号g(t)代表一个无失真的正弦波,由A至B范围内的数字输入组成,时间轴向下。信号u(t)代表模拟输出,其值在C至D范围内,时间轴向右。输出信号是通过传递函数反射的输入信号。请注意,输出信号是将g(t)上各点链接到u(t)上相应点的结果。图1显示在特定时间点t=tk的传递操作例子,该时间点确定输入信号上的点g(tk)。传递函数进而将g(tk)链接到输出信号上的相应点u(tk)。对于理想的线性传递函数,u(t)与g(t)成比例关系。请注意,g(tk)对应于x轴上的点xk,它通过传递函数反射至y轴上的点yk。借助关于耦合点集(g(tn),u(tn))的已有知识,可以确定传递函数上的相关点(xn,yn)。因此,通过输入信号g(t)上的点与输出信号u(t)上的点之间的关系,完全可定义传递函数。
对于N位DAC,边界值A和B取特定值,即A=0且B=2N–1。而为了方便起见,指定边界值C和D为C=A且D=B。这样意味实际DAC输出信号的比例和偏移,因而其峰峰值范围为0至2N-1。利用A、B、C、D的这些值,因为斜率m=1且截距b=0,所以理想传递函数可简化为y=x。
到目前为止,讨论的重点还是理想的DAC传递函数,但现在我们有了可以处理失真DAC传递函数f(x)的工具,如图2所示。需要注意的主要特点是:传递函数不再是直线y=x,而是一个形状函数f(x);图中随意以平滑弧形来表示。f(x)对输出函数u(t)的影响也同样重要。理想输入g(t)通过传递函数f(x)反射,产生失真输出u(t)。与现成DAC的传递函数相比,图中所示的弧形传递函数较为夸张,仅为加强说明效果而已。现代DAC的传递函数与理想的直线几乎没有偏差,但即使最微小的偏差也会导致输出频谱中出现谐波杂散。

图2. 失真的DAC传递函数
能否成功重构DAC传递函数,取决于是否能通过已知的g(t)和u(t)确定各点(xk,f(xk))。这一过程分为两步:首先采用一个代表理想采样正弦波的数值序列驱动DAC输入,利用频谱分析仪测量DAC输出,并记录基波信号和尽可能多谐波成分的幅值;然后将测得的谐波幅值转换为特定形状的传递函数。如果操作得当,将g(t)代入f(x)仿真u(t)将产生与测量结果相同的谐波失真值。
第一步:测量DAC谐波
第一步需要一个输入序列,用来代表一个以等距时间间隔采样的理想正弦波周期。目标是重构DAC传递函数,因此从0到2N–1的每个DAC码必须在输入信号中至少出现一次。输入序列需要2N以上的采样点才能以等距间隔使用每个DAC码,实际上至少需要2N+3个采样才能保证每个码都出现。下式可产生2K DAC码的理想正弦序列(K ≥ N+3)。函数round{x}将x舍入为最近的整数。

其中n=0,1,2,3, ... 2K-1
此方程式假设DAC将标准二进制格式的数字输入字解码为0至2N–1范围内的无符号整数。对于偏移二进制或二进制补码DAC,必须调整gn以表示负值。
数值序列(gn)以采样速率fs重复提供给DAC,因此DAC输出频谱含有频率f0=fs/2k的基波信号。谐波出现在2f0、3f0、4f0和f0的其它整数倍。由于DAC输出频谱具有采样性质,因此这些谐波的幅度受sin(x)/x响应的限制。不过,f0与fs相比微不足道,因此sin(x)/x响应实际上是平坦的,可忽略不计。例如,对于一个8位DAC,K ≥ 11且f0 ≤fs/2048,100次谐波的sin(x)/x将不超过0.39% (0.034 dB)。
为了准确重构传递函数f(x),需要根据谐波数(h)集尽可能记录更多谐波的幅值。这些整数从h=1(基波频率)至h=H,其中H表示取测量幅值的最高谐波数。例如,对于10次谐波的测量,H=10,该谐波数集为h={1, 2, 3, .. 10}。
然后,将各测量谐波的幅值(M)与其谐波数关联。例如,M1是1次谐波(基波)的幅值,M2是2次谐波的幅值,依此类推至MH。谐波幅值通常用相对于基波幅值的分贝数(dBc)来衡量。dBc转换为线性单位的公式如下:

其中D表示测得的谐波幅值,单位为dBc。例如,如果3次谐波的幅值为–40 dBc,则线性幅值M3=10–40/20或0.01。M1始终等于1,因为根据定义,基波的幅值为0 dBc。
第二步:重构DAC传递函数
该过程的第二步涉及到将谐波测量结果与传递函数相关。f(x)上的点取决于g(t)和u(t)上对应点之间的关系,因此首先必须将频域中的谐波幅值转换到时域。请注意,组成g(t)的DAC码与g(t)正弦形式的相关时间点一一对应。因此,构成g(t)的DAC码与时域相关。此外,u(t)通过f(x)与g(t)相关,而g(t)是一个时域函数,因此u(t)也必须表示为时域函数。这样就能将g(t)中的各时间点tk链接到u(t)中的相关时间点,从而由g(t)和u(t)确定f(x)。
将谐波幅值转换到时域非常困难,因为f(x)必须明确与g(t)中的各可能DAC码(0至2N–1)相关。g(t)是一个理想正弦波,因此确保唯一性的唯一方法是将范围限制在该正弦波单调增加的位置,如图3加粗部分所示。如果没有这一限制条件,f(x)上的一个点可能会映射到g(t)上的两个点,从而导致不明确。
为演示这种不定性,请想象将区间T向下移动。现在,f(x)上的点(xk, fkxk))可以与g(t)上的两个点相关,这是不可接受的。将范围T限制在图中所示位置,将不存在不定性。g(t)为正弦波,因此所需范围T对应于1/2周期,其初始相位偏移为3π/2弧度。
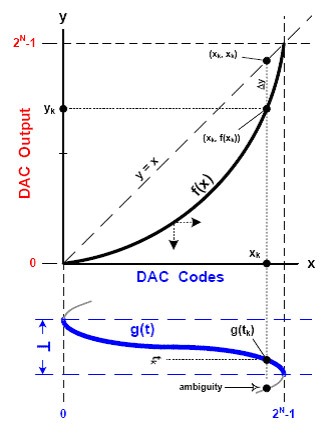
图3. f(x)与g(t)之间的关系
作者:Ken Gentile 来源:电子工程专辑





