

 相关专题:
相关专题:
随着科技的发展,信号处理系统不仅要求多功能、高性能,而且要求信号处理系统的开发、生产周期短,可编程式专用处理器无疑是实现此目的的最好途径。可编程专用处理器可分为松耦合式(协处理器方式,即MCU+协处理器)和紧耦合式(专用指令方式,即ASIP),前者较后者易于实现,应用较广。本文就是介绍一款松耦合式可编程专用复杂SoC设计实现,选用LEON3处理器作为MCU,Speed处理器作为CoProcessor。
LEON3及Speed
LEON3是由欧洲航天总局旗下的Gaisler Research开发、维护,目的是摆脱欧空局对美国航天级处理器的依赖。目前LEON3有三个版本(如表1),其中LEON3FT(LEON3 Fault-tolerant)只有欧空局内部成员可以使用。LEON3 (basic version)是遵循GNC GPL License的开源处理器,和SPARC V8兼容,采用7级Pipeline,硬件实现乘法、除法和乘累加功能,详细特性请参考相关技术文档[1]。
表1 LEON3的不同版本

目前,LEON3处理器因为开源、高性能、采用AMBA总线易扩展及软件工具完备等因素,在国内外大学(如UCB、UCLA、Princeton University等)及科研院所的科研活动中得到广泛应用。
Speed(又名GA3816)是一款我国自主研发、处于同时代国际先进水平、可重构、可扩展的面向FFT、IFFT、FIR及匹配滤波应用的信号处理器,其内部结构如图1所示,具有以下特点[2~4]:
1)Speed在追求运算速度的同时兼顾通用性,通过设置64位控制字,器件内部资源可根据不同应用进行重组;
2)可以实现FFT、IFFT、FFT-IFFT、FIR、滑窗卷积等运算,峰值运算能力达256亿次浮点乘累加/秒;3)由160个实数浮点乘法累加运算器组成40个复数乘法累加器阵列,1Mbit的双口SRAM,8个512×32bit系数ROM,两个直角到极坐标转换电路,两个对数变换电路及其它辅助电路和控制电路。
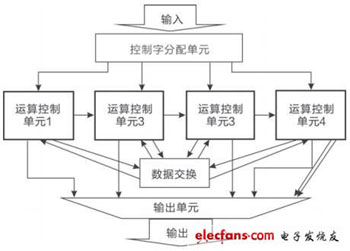
图1 Speed的内部模块结构
Speed传统的工作方式是通过片外FPGA输入控制信号和待处理数据,这不仅增大了PCB板级布线、调试的工作量,而且FPGA不能用C等高级语言编程,算法改动起来不灵活。另一方面,随着半导体工艺、微电子技术的发展,大规模的复杂SoC实现技术逐渐成熟,因此有必要将板级FPGA + Speed改进为芯片级MCU + Speed,这样既能实现真正的可编程增大灵活性,又能加快用户开发信号处理系统的速度。利用AHB实现通信
为了实现可编程,需要将C/C++程序表达的信息经过编译器、LEON3处理器、AHB总线、DMA控制器和必要的HDL代码,转化成Speed能够识别的信息,进入Speed模块中,如图2。其中AHB总线是LEON3 Core和Speed Core结合的关键。

图2 实现软件可编程的过程
AHB总线及AHB控制器
AMBA总线是一种应用广泛的层次化总线结构,有高速的AHB和低速APB之分,其中AHB是一种流水式高速总线结构,地址和数据总线相互独立,可挂载16个Master和Slaver设备,常用来组织和连接高性能模块,如处理器、DMA控制器、协处理器等[5~7]。AHB总线的核心是AHB控制器,主要包括仲裁器,译码器和多路复用器,其中仲裁器选择AHB Master,而译码器选择AHB Slave,实现写数据WDATA和读数据RDATA分开,如图3所示。

DMA控制器
DMA是指设备直接对计算机存储器进行读写操作的方式。这种方式下数据的读写无需CPU执行指令,也不经过CPU内部寄存器,而是利用系统的数据总线直接在源地址和目的地址之间传送数据,达到极高的传输速率。DMA控制器一方面可以接管总线,即可以像CPU一样视为总线的主设备,这是DMA与其它外设最根本的区别;另一方面,作为一个I/O器件,其DMA控制功能正式通过初始化编程来设置。当CPU对其写入或读出时,它又和其它的外设一样成为总线的从属设备。本文中为了实现DMA和AHB密切配合,即启动DMA后大量原始数据通过AHB总线从数据存储器进入Speed模块,需要DMA控制器内部包含AHB Master模块,如图4所示。另外需要说明的是,LEON3为了实现AHB上设备的plug&play需要在0xFFFFF000-0xFFFFF800地址空间添加设备信息[8~9],所以DMA 控制器和Speed协处理器亦要如此,以便LEON3的软硬件协调一致。在C语言实现DMA时,向DMA的控制寄存器写入相应的信息,即可启动DMA传输,如图5所示。

图4 DMA与AHB Master的关系

图5 启动DMA的C代码示意
Speed的AHB接口
为了使Speed可以顺利接收LEON3传送过来的控制字或DMA传送过来的原始数据,需要在原有的Speed core模块顶层添加AHB Slaver协议来接收AHB上传送的数据,以及产生相应波形的HDL代码来将C程序的信息生成Speed所能识别的信号波形进入Speed模块内部,即从图6中的控制字,转化成图7中的时序。
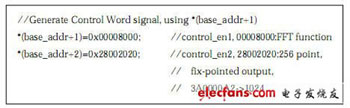
图6 C语言描述的Speed控制字

图7 Speed core所需的配置时序
同理于控制字,滤波系数和原始数据的输入亦需要一定的HDL代码来实现指令或数据向时序图的转化,其本质相当于译码,实现起来难度不大,此处就不再累述。Speed处理后数据通过状态信号(zero_flag)下降沿触发LEON3的中断响应,实现向外部存储器的输出,此过程和数据输入类似。
编程、编译及仿真
用户在C编程时,只需要按照Speed所需的启动方式,先设置控制字、再输入滤波系数、然后启动DMA输入原始数据。值得注意的地方是,为了实现Speed的运算与DMA中原始数据输入同步,需要在C代码的不同指令间插入一定的延迟指令,此延迟间隔可根据软硬件的响应速度来计算。
Gaisler Research公司提供完整的LEON3开发套件,包括C代码编译器sparc-elf-gcc,大大方便了软硬件开发和联合调试。 将LEON3和Speed的SoC硬件HDL描述,及编译后的二进制指令调入Modelsim进行软件仿真,再利用FPGA进行硬件仿真,其结果如图8、9、10所示。

图8 从C语言控制字产生的配置时序

图9 触发中断响应的zero_flag信号

图10 在Altera StratixII 2S180中的仿真结果
结语
本项目利用LEON3的高性能、易编程、开源等优点,开发了AHB总线接口和DMA控制器,实现了Speed专用信号处理器的软件可编程,大大简化了Speed用户的开发过程。有待改进之处是,1)当前Speed可处理40bit数据,而Leon3是32bit,没有最大限度发挥Speed的运算能力;2)如果在LEON3上运行RTEMS (Real Time Executive for MultiProcessor Systems) 操作系统,将进一步方便用户扩展LEON3的利用价值。
来源:电子产品世界





