

 相关专题:
相关专题:
Android是指“机器人”,由Google公司于2007年11月5日发布的基于Linux平台的开源手机操作系统,是首个为移动终端打造的真正开放和完整的移动软件。Android是一个开放平台,在嵌入式移动设备领域里具有良好的应用前景,但在不同的设备上往往有不同的硬件支持,要在Android中添加这些硬件应用,不是单纯地在Linux内核中添加驱动模块,还必须在用户空间和应用框架中添加对应的支持。
控制器局域网络(Control Area Network,CAN),属于现场总线的范畴,是德国Bosch公司在20世纪80年代初,为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信总线。由于CAN总线的数据通信具有良好的可靠性、实时性和灵活性,CAN已经在汽车工业、航空工业、工业控制等领域中得到了广泛应用。文中以S5PV210微处理器为硬件平台,通过扩展其SPI接口,实现了CAN控制器MCP 2515在Android操作系统下的驱动程序开发。
1 系统硬件结构
系统数据的收发都要通过CAN总线模块,CAN总线模块设计框图如图1所示,S5PV210通过SPI接口实现与MCP2515的连接,MCP2515的CAN输入输出引脚和CAN总线收发器MCP2551接在一起,构成一个完整的CAN总线收发模块。

1.1 S5PV210的SPI接口
接口协议(Setial Peripheral Interface,SPI)是Motorola公司推出的一种使用时钟线和2根数据线传输数据的同步串行协议,即串行外设接口。S5PV210提供的SPI接口主要用于S5PV210与外围低速器件之间进行同步串行数据传输,可以实现全双工通信,传输速度最高可达5 Mbit·s-1。SPI总线接口主要用于主从分布式的通信网络,由4根线即可完成主从之间的数据通信,这4根线分别为:时钟线(SCLK)、数据输入线(SI)、数据输出线(SO)和片选线(CS),其中CS的有效与否完全由主控制器决定,时钟信号也由主控制器发出。
1.2 CAN控制器MCP2515
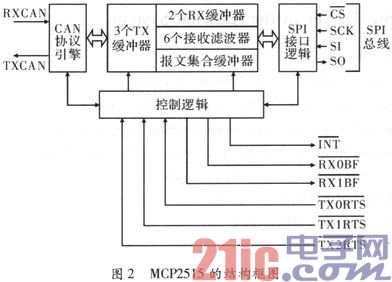
MCP2515是Microchip生产的一款独立CAN协议控制器。MCP2515支持CAN1.2、CAN2.0A、主动和被动CAN2.0B等版本的协议,能够发送和接收标准和扩展报文,它还同时具备验收过滤以及报文管理功能。图2为MCP2515的结构框图。该器件主要由3个部分组成:(1)CAN协议引擎。(2)为器件及其运行进行配置的控制逻辑和SRAM寄存器。(3)SPI协议模块。
1.3 CAN收发器MCP2551
MCP2551是一个可容错的高速CAN器件,可作为CAN协议控制器和物理总线接口。MCP2551可为CAN协议控制器提供差分收发能力,它完全符合ISO—11898标准,且满足24 V电压要求。它的工作速率达1 Mbit·s-1。
2 CAN总线驱动程序的设计
2.1 Android操作系统驱动原理
Android虽然使用了Linux内核,但应用程序是用Java语言开发的,所以应用程序在调用设备驱动不能像Linux应用程序那样使用系统调用,必须用Java虚拟机的JNI的本地(Native)方法。另一方面,Android要成为一个通用性强的平台,必须加强它的可移植性,这也是在Andr oid架构添加一个(HAL)硬件抽象层的原因,目的是为设备的调用提供一个更高级的封装。图3所示为Android驱动程序的技术结构。

HAL Stub以*.so库的形式存在,在整个驱动架构中,它是驱动运行在用户空间的一部分,它往上为Dalvik虚拟机提供硬件设备的抽象接口,往下通过系统调用与Linux内核中的驱动程序交互数据,在这个过程中HAL可以对驱动程序的数据进行处理,即在Linux内核中的驱动程序只需提供一个与硬件设备传输数据的功能,而具体的操作可以由HAL完成。Android下CAN总线驱动程序的实现,不但要在Linux内核中添加CAN驱动模块,还必须在用户空间和应用框架中添加对应的支持。
2.2 CAN驱动程序实现流程
主控制器S5PV210通过其自身的SPI接口实现与MCP2515的连接,若要使平台正常工作,软件的实现是必需的。首先要确保S5PV210的SPI口可以正常收发数据,然后利用SPI口对MCP2515的寄存器进行设置。CAN驱动程序流程图如图4所示,第一步是实现S5PV210的SPI总线的加载和声明;第二步是Linuxkernel中CAN驱动的实现,包括MCP2515的初始化、MCP2515的读写、CAN驱动的加载。第三步是Android HAL层的调用。

3 CAN总线驱动程序的实现
3.1 SPI总线加载和声明
系统的CAN总线设备通过S5PV210的SPI总线连接,因此,需要设计SPI线驱动完成数据接收与发送。关于SPI总线驱动在Linux内核中已有良好的支持,加载并声明SPI总线就可以直接使用。Linux内核使用包装后的抽象设备驱动spi_driver,间接与原始设备驱动建立联系,并最终通过调用driver_register来注册原始设备驱动,即只需要在内核提供的spi_driver上修改调试,大幅提高了程序效率和可移植性。
这样在结构体mop2515_driver里完成了对MCP2515驱动函数probe,remove的赋值。然后就可以通过SPI对MCP2515的寄存器进行设置来实现CAN总线驱动程序
3.2 Linux中CAN驱动程序实现
针对MCP2515控制器,在Linux kernel设计中采用字符设备驱动开发的形式。驱动初始化函数staticint_init MCP2515_init(),首先通过ioremap()函数将S5PV210的SPI寄存器的物理地址映射到内核空间,这样才可以在驱动程序中访问和配置S5PV210的SPI寄存器。在正确配置S5PV210的SPI寄存器后,通过register_chrdev()函数为MCP2515注册设备驱动,分配主设备号,这样在设备文件目录中创建对应的设备文件后,就可以用Linux的系统函数操作MCP2515了。而分配内存部分放在probe()函数中完成,分配空间包括为设备数据结构以及其内部的接收发送缓冲区动态分配空间。同时在probe()还需要完成申请中断工作,并初始化中断处理队列,在中断处理队列中读取CANINTF寄存器,判断是接收/发送中断的哪一个缓冲器,或者说是错误中断最后通过enable_irq()函数使能S5PV210相应的中断引脚。
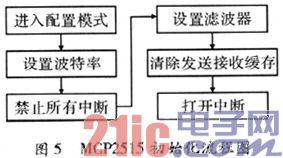
(1)MCP2515初始化。在实现了SPI的加载和声明后,就可以利用SPI写命令对MCP2515进行初始化。MCP2515的初始化过程为:首先将CAN控制寄存器CANCTRL的REQOP<2:0>位设置为‘100’进入配置模式,所有错误计数器被清零,进入配置模式后设置波特率,禁止所有中断,设置滤波器,清除发送接收缓存,打开中断,完成MCP2515的初始化。MCP2515初始化过程如图5所示。
(2)MCP2515中断方式。由于CAN总线接收数据时必须与系统以中断方式交换数据,所以必须注册中断。使用的中断函数有request_irq(),free_irq(),enable_irq()和disable_irq(),其中函数request_irq()是给定的中断源装载中断处理程序;enable_irq()调用中断控制函数使给定的中断链有效;free_irq()释放分配给已定中断的内存;disable_irq()使定义中断链失效。具体代码为request_irq(irq_EINTO mcp2515_int,IRQF_DISABLED,device_name,NULL);其中函数request_irq()的第1个参数是设备申请的中断号;第2个参数是向系统注册的中断处理函数;第3个参数是中断处理的属性,IRQF_DISABLED表示中断处理程序是一个快速中断处理程序,被调用时屏蔽所有中断;第4个参数是中断的设备名称;第5个参数是申请时通知系统的设备标志,该函数返回值为0表示申请成功,返回负数表示失败,这样当中断发生时,在中断处理函数mcp2515_int()中读取CAN状态寄存器CANSTAT,判断RXB0是否装入报文,如果是则把报文通过SPI接收数据寄存器读取到buff er中,等待系统函数CAN_Read()读取。
(3)MCP2515驱动程序的核心文件结构file_operations。CAN总线应用程序通过file_operations数据结构访问CAN设备驱动函数,</kem el/linux/fs.h>对file_operations数据结构中的各个变量做了详解。内核可以通过文件结构来访问驱动程序的函数,实现系统调用。
CAN应用程序可以通过系统函数read()和write()实现读取和写入相应的数据,open()函数中完成设备的打开,close()函数中完成注销设备的工作,ioctl()函数中需要完成MCP2515控制器的初始化工作:设置控制器的工作模式、设置控制总线的波特率、清空发送缓冲区和接收缓冲区等。
3.3 CAN驱动编译
(1)将写好的驱动源文件拷贝到/kernel/drivers/char/下,并打开Kconfig添加如下代码:
config S5pv210_CAN
tristate“S5pv210 can controller driver”
depends on ARCH_S5pv210
help
This option enable support for CAN
(2)在/kernel/drivers/char/Makefile文件的适当位置添加如下代码:
obj-$(CONFIG_S5pv210_CAN)+=S5pv210-can.o
(3)添加can功能。在/kernel/下make menuconfig DeviceDrivers→Characterdevices→
(4)重新编译内核。在终端进入/kernel/目录,执行make命令后在/kernel/drivers/char/下找到S5pv210_can.o,此为Linux kernel层生成的CAN设备驱动文件,kernel层驱动向下直接操作硬件,向上层也就是HAL层,提供/dev/can设备节点文件,提供驱动接口unclocked_ioctl()函数。
4 Android HAL层的调用
CAN驱动程序在Android系统下的实现,硬件抽象层(HAL)的调用是关键。将Android系统移植到其他硬件平台或在Android系统中添加新硬件支持时,都需要对Android HAL层进行移植或实现在libhardware接口的头文件hardware.h中,定义了HAL实现过程中的3个通用结构体struct hw_module_t、struct hw_module_methods_t和struct hw_device_tostruct hw modules_methods_t用来表示一个模块表示方法,结构体中只包含了打开模块的函数指针。struethw_module_t用来定义一个硬件模块的信息,具体的硬件模块中,需要“继承”这个结构体。st ruct hw_device_t用来表示一个硬件设备,在一个硬件模块中可以同时包含多个硬件设备。在一个模块的HAL层开发中,具体的硬件调用流程为:(1)通过ID得到硬件模块。(2)从硬件模块得到hw_modules_t,打开得到硬件设备hw_device_t。(3)调用hw_device_t中的各个方法。(4)通过hw_device_t的close关闭设备。
Android系统下CAN模块的实现在完成SPI总线和:MCP2515控制器的驱动后必须实现Android HAL层的调用。CAN总线的HAL层调用流程如图6所示。

编写HAL层使用struet hw_module_t、struct hw_module_methods_t和struct hw_device_t 3个结构体来设置对CAN模块的操作方法;JNI层主要完成对HAL层提供的硬件操作方法的注册,JNI通过CAN_HARDWARE_MODULE_ID找到对应的stub,使Framework层可以使用这些方法;Setv ice层主要声明了JNI可以提供的方法,加载libcan_runtime.so,加载时会调用JNI层的JNI_OnLoad,这样JNI中的方法可以被 Service调用;编写App应用程序,使App直接调用service,完成Android HAL层的调用。之后将can文件夹放到系统development目录下。
配置环境变量执行../build/envsetup.sh。然后执行mmm development/can编译文件。最后,重新编译内核,生成镜像文件,下载并运行操作系统。此时,CAN总线驱动程序将会加载,这样就实现了Android系统下CAN控制器MCP2515驱动程序的开发。
5 结束语
在分析Android驱动原理的基础上,介绍了CAN总线在Android下的实现流程,并添加了CAN驱动程序在嵌入式操作系统Android中,对其他Android平台非标准设备驱动程序的开发有一定的借鉴作用。
作者:李玉洁 朱维杰 来源:电子科技





